
원래 장소:
중국
브랜드 이름:
YOUNGYOU
인증:
CE
모델 번호:
WPDC5
연락주세요
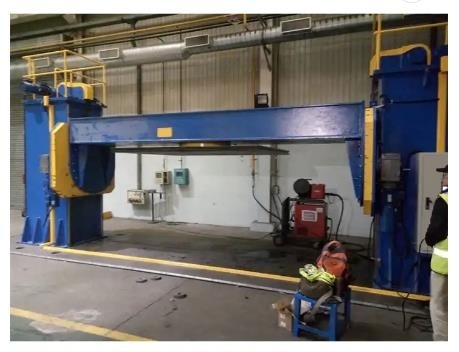





용접되기 위한 포지셔너로 용접되는 자동 용접 포지셔너 로봇 팔
제품 소개
기울면서, 우리의 이중 열 용접 포지셔너가 회전한 것과 함께 있다고, 펑션플크 제어 시스템을 이동한 상승과 기지는 동시에 일어나는 고정밀 상승을 제어할 수 있습니다. 칼럼 중 하나는 움직일 수 있는 것이라는 것 베디자인드, 수평선상 beam.it이 매우 자동용접 센터, 트하트캔을 결합시키기 위해 용접 매니퓰레이터 칼럼 붐으로 운영할 수 있는 획득이 용접의 용접 효율과 질을 향상시킨 후 그것이 철도에 계속 나아갈 수 있습니다. lt는 넓게 boilers.petrochemical, 조선, 자동차, 철강과 많은 다른 산업에서 사용되었습니다. 특색있는 소자 구조 니샤드밴스드, ful, 작동하도록 쉬운 신축성 제어는 이상적 장비를 달성하기 위해 용접 앤드월드링 자동화의 품질을 향상시키는 것입니다.이중 열 용접 포지셔너 외에, 우리는 또한 L 타입 용접 포지셔너, 머리와 테일월드링 포지셔너, C 형 용접 포지셔너 기타 등등을 가지고 있습니다. 우리는 다른 제조 공정에 있는 제품 또는 프로세스 요구 사항에 따라 다른 용접 포지셔너를 설계할 수 있습니다.
가장 적당한 로봇을 선택하는 방법은 당신을 위한 위치 탐사 장치를 도왔습니다
로봇을 선택하는 것 위치 탐사 장치를 도왔을 때, 당신은 당신의 적용상황을 기반으로 최고 판단을 만들 필요가 있습니다. 그리고 당신은 다음과 같은 핵심을 고려할 필요가 있습니다 :
얼마나 많은 공간이 로봇과 위치 탐사 장치들을 수용할 필요가 있습니까?
제조 공정에 있는 제품의 기하학적 구조가 무엇입니까?
각각 개별적 위치 탐사 장치를 위해 그 제조 공정에 있는 제품이 너무 크거나 무겁습니까?
가장 합리적인 것 어느 위치 탐사 장치입니까?
최대 적재량 성능 요구 사항이 무엇입니까?
한때 당신은 이러한 관점에서, 기초가 된 필요를 가장 잘 충족시키는 위치 탐사 장치를 결정했고 당신이 다양한 제조사들의 제품으로부터 적당한 모델들을 찾을 수 있습니다.

회사에 대하여
우리의 가이드 레일은 ABB KUKA 화낙 야스카와 UR와 같은 많은 국제적인 잘 알려져 있는 로봇 브랜드와 협력했습니다. 주로 포함된 회사는 팰릿 위에 얹고, 로딩되고 짐을 내릴 것을 포함합니다. 500 킬로그램 내지 5000 킬로그램으로부터의 가이드 레일 범위의 로드. 가이드 레일의 길이는 고객들의 요구에 따라 맞춤화됩니다. 우리는 ABB IRB6700 로봇이 20 CNC 기계에 해당되고 50m 긴 가이드 철도가 로봇의 왕복 운동, 하역을 완료한다고 주장했습니다. 로봇의 수는 매우 줄고 통합 비용이 구해집니다.
우리의 회사는 함께 주문을 더 낮은 가격에 두기 위해 또한 산업용 로봇을 매우 호의적인 가격에서 제공합니다.
우리의 로봇과 철도를 조사하기 위해 상하이, 중국을 환영하세요!
기업 상품 공급
ABB 로봇
KUKA 로봇
야스카와 로봇
화낙 로봇
UR 로봇
코봇
가이드 레일
코봇은 중국에서 했습니다
품질 규격
제품은 테이블을 매개변수화합니다
패키징과 운송
![]()
![]()
직접적으로 당신의 조사를 우리에게 보내세요



