
원래 장소:
중국
브랜드 이름:
YOUNGYOU
인증:
CE
모델 번호:
PY4030U-050
연락주세요





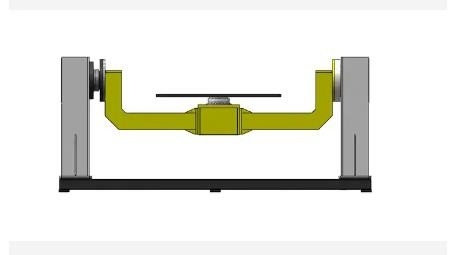
중국에서 만들어진 채 1200*1200 턴테이블 380v 50-60hz 주축은 100-1000kg 2축 용접 포지셔너를 로딩합니다
광반사 네비게이션과 이동 로봇을 위한 위치 설정 기술
전형적 광반사 네비게이션 배치 방법은 주로 이르는데 레이저 또는 적외선 센서를 사용합니다. 레이저와 적외선은 둘 다 네비게이션과 위치설정을 위한 광반사 기술을 사용합니다.
레이저 위성항법장치는 일반적으로 레이저 회전 메커니즘, 반사기, 광전자 수신 장치와 데이터 수집과 송신 장치로 구성됩니다.
작동 동안, 레이저는 회전하는 거울 메커니즘을 통하여 밖으로 분사됩니다. 협력적 랜드마크를 스캐닝하는 것 뒤처지는 반사기를 구성했을 때, 반사광은 검출 신호로서 수광 장치에 의해 처리됩니다. 데이터 획득 프로그램은 회전 메커니즘 (대상의 측정된 각도 값)의 코드 디스크 데이터를 읽기 위해 시작되고, 그리고 나서 통신을 통하여 데이터 자동 처리를 위한 상부 컴퓨터로 전송했습니다. 랜드마크와 탐색되는 정보의 가시 위치를 기반으로, 랜드마크 좌표 시스템에서 센서의 현재 위치와 방향은 더 나은 내비게이션과 위치설정을 달성한다고 적합할 수 있습니다.
레이저 범위작업은 거리측정 방향으로 협 빔, 좋은 평행, 작은 산재와 고해상도라는 유리한 입장에 있지만, 그러나 그것이 또한 매우 환경적 요소에 의해 영향을 받습니다. 그러므로, 어떻게 잡음 제거에 레이저 범위작업을 사용할 때 그 수집되기 신호하는지 또한 주요 난제입니다. 게다가 네비게이션을 달성하는 것을 어렵게 하고 레이저에 의해 단독으로 배치하면서, 레이저 범위작업은 또한 맹점을 가지고 있습니다. 산업 적용에서, 일반적으로, 그것은 여전히 넓게 감지 파이프라인 결함과 같은 특정 범위 이내에 산업적 현장의 시험에서 사용됩니다.
적외선 센싱 기술은 로봇 팔의 표면을 커버하는 로봇 민감성 피부의 큰 영역을 형성하기 위해 종종 다중 공동 로봇 장애물 회피 시스템에서 사용되고, 작전 동안 로봇 팔에 의해 마주치게 된 다양한 물체를 발견할 수 있습니다.
전형적 적외선 센서는 수신기의 역할을 하는 적외선등과 고체 상태 감광성 다이오드를 방출할 수 있는 고체 상태 발광 다이오드를 포함합니다. 피변조신호는 적외선 발광 튜브에 의해 분사되고 적외선 감광성 튜브가 목표에 의해 반영된 적외선 피변조신호를 받습니다. 환경적 적외선 간섭의 제거는 신호 변조와 헌신적 적외선 거르개에 의해 보증됩니다. 출력 신호vo가 반사광 세기의 전압 출력을 대표하면 보는 탐침과 제조 공정에 있는 제품 사이의 거리의 기능입니다 : Vo=f (x, p), P가 제조 공정에 있는 제품의 반사 계수인곳. P는 목표물의 표면 색과 거칠기와 관련됩니다. X - 탐침과 제조 공정에 있는 제품 사이의 거리.
제조 공정에 있는 제품이 똑같은 p 값과 같은 유형의 목표물일 때, X와 보는 상관적이어서 대응합니다. X는 다양한 목표물의 근접 측정의 실험 데이터를 삽입함으로써 획득될 수 있습니다. 이런 방식으로, 로봇과 목표물 사이의 거리는 적외선 센서를 사용하여 측정될 수 있고 다른 정보 처리 방법이 또한 이동 로봇을 길을 찾고 위치시키는데 사용될 수 있습니다.
비록 또한 배치하는 적외선 센싱이 그들의 높은 각 분해능과 낮은 거리 결정 때문에, 고감도와 단순 구조와 저비용과 같이 장점을 갖는지만, 그들은 로봇의 긴급 정차를 용이하게 하면서, 접근 또는 갑작스러운 이동 장애물을 발견하기 위해 일반적으로 이동 로봇에서 근접감지기로서 사용됩니다.
![]()
회사에 대하여
우리의 가이드 레일은 ABB KUKA 화낙 야스카와 UR와 같은 많은 국제적인 잘 알려져 있는 로봇 브랜드와 협력했습니다. 주로 포함된 회사는 팰릿 위에 얹고, 로딩되고 짐을 내릴 것을 포함합니다. 500 킬로그램 내지 5000 킬로그램으로부터의 가이드 레일 범위의 로드. 가이드 레일의 길이는 고객들의 요구에 따라 맞춤화됩니다. 우리는 ABB IRB6700 로봇이 20 CNC 기계에 해당되고 50m 긴 가이드 철도가 로봇의 왕복 운동, 하역을 완료한다고 주장했습니다. 로봇의 수는 매우 줄고 통합 비용이 구해집니다.
우리의 회사는 함께 주문을 더 낮은 가격에 두기 위해 또한 산업용 로봇을 매우 호의적인 가격에서 제공합니다.
우리의 로봇과 철도를 조사하기 위해 상하이, 중국을 환영하세요!
기업 상품 공급
ABB 로봇
KUKA 로봇
야스카와 로봇
화낙 로봇
UR 로봇
코봇
가이드 레일
코봇은 중국에서 했습니다
품질 규격
제품은 테이블을 매개변수화합니다


패키징과 운송
![]()
![]()
직접적으로 당신의 조사를 우리에게 보내세요




